Los robots cuidarán de los mayores recordándoles comer, beber, hacer ejercicio o relacionarse


Al envejecer empeora la calidad de vida, sobre todo si no se tiene ayuda. Fallos en la memoria, por ejemplo, provocan olvidos tan básicos como comer o beber. También se puede ver mermada la movilidad o padecer soledad y aislamiento social. Muchos ancianos tienen la fortuna de contar con alguien que les cuide, pero a veces esa persona (quizás su cónyuge) tiene una edad similar y puede necesitar también ayuda. Por eso un equipo europeo formado por representantes de universidades, institutos de investigación, empresas y organizaciones de asistencia trabaja en un nuevo tipo de cuidador social capaz de proporcionar esa ayuda en estas y otras situaciones. Se trata del proyecto Mobiserv, dedicado desde hace tres años a crear un compañero robótico para personas mayores que pueda recordarles la necesidad de comer, beber, tomar la medicación, estructurar el día y ayudarles a mantenerse activos sugiriendo una serie de actividades.
Por ejemplo, si un adulto no toma ningún líquido en cierto tiempo, con el consiguiente riesgo de deshidratación, el robot puede aconsejarle que beba algo, incluso sugerirle una bebida concreta según sus gustos o necesidades. Esta misma función se repetiría en relación con la alimentación, el ejercicio físico, las actividades y los contactos sociales. Si el mayor no se comunica con nadie durante un tiempo, el robot podría proponerle que llame por teléfono o salga a visitar a alguien, consejos útiles para quienes presentan riesgo de sufrir aislamiento social.
Este robot es uno de los componentes de un sistema automático más amplio que los responsables de Mobiserv están desarrollando para personas de edad avanzada. También comprende ropa inteligente capaz de, por ejemplo, monitorizar los signos vitales y los patrones de sueño y detectar caídas, así como un entorno domótico que constará de sensores inteligentes, dispositivos de reconocimiento óptico y automatismos domésticos. Todo ello permitirá detectar los hábitos de ingesta de alimentos y bebidas, patrones de actividad y también situaciones peligrosas.
Compañero robótico
Mobiserv inició su andadura en diciembre de 2009. Ya en su segundo año desarrolló un prototipo de compañero robótico social tras realizar una extensa investigación en la que participaron usuarios finales con sus correspondientes cuidadores, formales e informales.
A partir de las pruebas y observaciones de este prototipo, se está mejorando y ajustando el robot y las demás prestaciones de Mobiserv para que resulten más útiles, aceptables y divertidas.
Para averiguar cuáles son las vivencias e impresiones de las personas mayores ante la introducción de este sistema en su hogar, se harán estudios de evaluación de los usuarios del compañero robótico durante los próximos meses. De esta manera lo han confirmado investigadores de la Universidad del Oeste de Inglaterra – Bristol (Reino Unido), el Smart Homes Institute de Eindhoven (Países Bajos) y la organización de asistencia Ananz de Geldrop (Países Bajos). Planean efectuar pruebas de usabilidad en un laboratorio doméstico, ensayos prácticos durante una jornada completa en una vivienda piloto y también experimentos de varios días en los propios hogares de los usuarios.
Perfeccionar el robot
En el transcurso de las evaluaciones planeadas, los ancianos participantes podrán usar con libertad su compañero robótico, mientras que los cuidadores podrán personalizar y utilizar el sistema para facilitar la existencia de sus seres queridos. La finalidad de estas evaluaciones es dar a usuarios y cuidadores la oportunidad de experimentar lo que Mobiserv puede ofrecerles, perfeccionar el sistema y averiguar el mejor modo de comercializarlo. El objetivo último no es otro que capacitar a los ancianos para que sean autónomos y favorecer su bienestar e independencia y los de sus cuidadores.
Las evaluaciones con usuarios se prolongarán desde abril hasta junio de 2013 y tendrán lugar en Reino Unido y Países Bajos. Desde junio hasta agosto, el proyecto Mobiserv y su compañero robótico se presentarán y exhibirán en diversos eventos en distintos puntos de Europa.
Robots que limpian las calles, una realidad

Puede sonar a ciencia ficción, pero ya se están haciendo realidad robots diseñados para la limpieza de las calles. Así es con el proyecto DUSTBOT (Networked and Cooperating Robots for Urban Hygiene) que se fundamenta en la idea de emplear robots en entornos parcialmente desestructurados (como plazas, calles y parques) con el fin de limpiar suciedad y desperdicios. Estos ingenios podrán también recoger cantidades pequeñas de basura doméstica en la misma puerta de casa de quien lo solicite.
 Robot limpiador
Robot limpiador
DUSTBOT se ha desarrollado en el laboratorio CRIM de la Scuola Superiore Sant’Anna de Pisa (Italia) bajo la coordinación del profesor Paolo Dario. En su opinión, con los robots se acabarían los horarios fijos de recogida de basuras y mejoraría la gestión de los residuos, puesto que están diseñados para trabajar en centros urbanos densos donde tienen dificultad para circular los camiones de recogida de gran tamaño.
El prototipo de robot mide 1,5 metros, pesa 70 kilos y puede transportar 80 litros o 30 kilos. Se desplaza un metro por segundo y su batería le otorga una autonomía de 16 kilómetros. Se orienta gracias a información cargada previamente sobre su entorno, incluidos mapas de la zona. Esta información se almacena en sistemas de sensores tanto incorporados como externos (una plataforma de inteligencia ambiental). Los robots se desplazan con un grado de autonomía regulable para cumplir sus tareas. Están equipados con un escáner láser y un sistema de ultrasonido para evitar obstáculos.
Se han diseñado y construido dos clases de robot. Uno es el robot de limpieza DustClean, equipado con utensilios de limpieza, múltiples sensores y una nariz electrónica para detectar contaminantes atmosféricos y ofrecer información sobre la calidad del ambiente. Otro es el robot para la recogida de basuras en un entorno urbano llamado DustCart, dotado de un carro para el transporte y la eliminación de las bolsas de basura. Este robot cuenta con una interfaz de usuario que proporciona a voluntad información sobre la calidad del aire y la gestión de La mayor ventaja del robot es su tamaño, pues así puede desplazarse por calles estrechas y callejones donde los vehículos normales de recogida de basuras no pueden adentrarse.
El proyecto DUSTBOT recibió una financiación de casi 2 millones de euros en virtud del área temática Tecnologías de la Sociedad de la Información (TSI) del Sexto Programa Marco (6PM) y se basa en la colaboración de nueve socios de cinco países.
El robot mosca echa a volar

Volar como los pájaros, como los murciélagos y ahora como las moscas. El robot mosca acaba de levantar su primer vuelo tal y como hace este insecto, uno de los más ágiles de la naturaleza. Imitar su destreza en un robot a escala requiere soluciones no convencionales a problemas como la propulsión. Investigadores de la Universidad de Harvard han construido el primer robot de estas características. Pesa 80 miligramos, el tamaño de un insecto, y alas que copian su vuelo, logrando que lleve a cabo proezas aerodinámicas como evitar un manotazo o aterrizar en una flor agitada por el viento, habilidades que todavía no se entienden completamente.
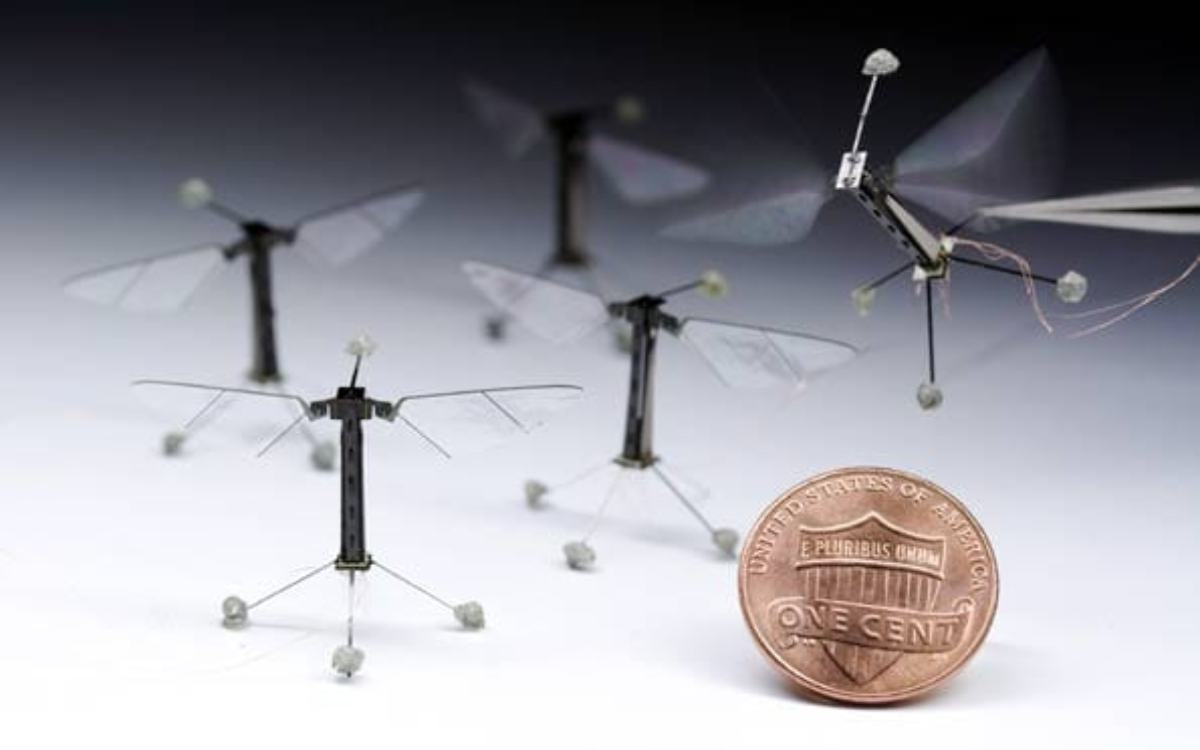
Desarrollar un robot a escala con esta maniobrabilidad es un reto, puesto que las tecnologías convencionales a escala macroscópica resultan inútiles. Por primera vez, un grupo de ingenieros ha logrado construir una máquina con estas características. Para conseguirlo, los investigadores de la Universidad de Harvard, liderados por Kevin Ma, han optado por soluciones inspiradas en la biología de estos insectos, con alas que imitan su vuelo, tal y como ha publicado la revista Science.
Micrómetros
El tamaño de los componentes necesarios para una mosca robótica oscila entre micrómetros y centímetros, demasiado grande para los sistemas microelectromecánicos y demasiado pequeño para los métodos tradicionales.
El funcionamiento del robot se inspira en la biología de estos insectos
Para llenar el vacío en esta escala intermedia, los investigadores han desarrollado una nueva metodología, las ‘microestructuras compuestas inteligentes’.
Además, como el vuelo de las moscas es energéticamente muy costoso, se han empleado materiales piezoeléctricos, capaces de generar electricidad al someterse a tensiones mecánicas.
Los dípteros –las moscas– fueron los insectos seleccionados como modelo por la relativa sencillez de su vuelo, puesto que, como su nombre indica, tan solo tienen dos alas. Gracias a su escala y su habilidad para el vuelo estable, la mosca robótica ayudará a entender la mecánica del vuelo de estos animales.
Un robot de iRobot ayudará a tener reuniones de telepresencia en movimiento
iRobot Ava 500se es un modelo de robot que se mueve de forma autónoma e inteligente en lugares como oficinas, plantas de fabricación o laboratorios sin tropezarse con las personas o los objetos. La empresa iRobot ha anunciado hoy en la feria InfoComm de Orlando (Florida, EE. UU.) que está trabajando con Cisco para lanzar al mercado el robot de colaboración mediante vídeo de clase empresarial iRobot Ava 500. Está pensado para ayudar a los profesionales remotos a participar en reuniones y presentaciones en sitios donde la movilidad resulta importante. El nuevo modelo también está diseñado para proporcionar un acceso visual móvil en plantas de fabricación, laboratorios, centros de pruebas y otras ubicaciones remotas de la cadena de suministro. Estará disponible a partir de 2014.
 Cómo funciona
Cómo funciona
El usuario remoto puede controlar y programar la agenda de iRobot Ava 500 mediante unainterfaz tan familiar como la del iPad®, mientras los destinos pueden configurarse haciendo clic en la ubicación sobre un mapa o seleccionando una sala concreta o el nombre del empleado. Una vez elegida la ubicación, el robot disponible se activa y se desplaza ‘trasladando’ al usuario hasta el punto deseado.
El robot puede operar en modo “público” o “privado”, convirtiendo el recorrido desde su estación de carga hasta el punto de reunión en un asunto privado -en el que la pantallapermanece inactiva- o público, mostrando el rostro del usuario en la pantalla. En este último caso, el usuario puede ver y ser visto a través del robot, e incluso puede pararlo para mantener una conversación de paso con un compañero. Cuando la sesión ha terminado, iRobot Ava 500 vuelve de forma automática a su estación base para recargarse.
Características únicas
Ava 500 cuenta con características únicas, entre las que se incluyen:
· Navegación autónoma. Ava 500 se basa en el concepto de “navegación autónoma”, lo que significa que no hay necesidad de “conducir” el robot, permitiendo que el usuario se concentre en sus tareas y eliminando la necesidad de recibir formación compleja para utilizarlo. La plataforma robótica móvil de iRobotmapea el entorno y es capaz de auto-dirigirse de forma inteligente y segura en ubicaciones complejas como oficinas, plantas de fabricación o laboratorios sin tropezarse con las personas o los objetos
· Interoperabilidad y seguridad de clase empresarial. Ava 500 emplea tanto el terminal Cisco TelePresence EX60 como los puntos de acceso inalámbricos de la familia Cisco Aironet 1600 para proporcionar una seguridad de clase empresarial y una interoperabilidad con cualquier entorno de colaboración mediante vídeo basado en estándares.
Casos de uso Ava 500 está específicamente diseñado para el mercado empresarial*, y entre los primeros casos de uso previstos se incluyen:
· Colaboración con equipos remotos, permitiendo a los profesionales móviles una colaboración más personal con sus equipos de trabajo.
· Gestión ejecutiva, que permite a los directivos que gestionan equipos satélite estar presentes de una manera más personal y moverse por el entorno de la oficina.
· Inspecciones y tours, facilitando el acceso móvil a distintas zonas como fábricas, laboratorios, almacenes o centros de pruebas.
· Presentaciones o formación en remoto, proporcionando una experiencia más personal e interactiva al permitir al formador mantener conversaciones individuales con los participantes.
Disponibilidad
La disponibilidad de iRobot Ava 500 está prevista para comienzos de 2014 a través de colaboradores seleccionados de Cisco. iRobot y Cisco harán una demostración del funcionamiento del robot en la feria InfoComm 2013 que se celebra en Orlando entre el 12 y el 14 de junio (estands números 1687 y 2743).
 Condenado a 4 años de prisión por robar un reloj de 120.000 euros a un turista brasileño en Barcelona
Condenado a 4 años de prisión por robar un reloj de 120.000 euros a un turista brasileño en Barcelona
 Cada vez más solos: el auge de los servicios que prometen combatir la soledad
Cada vez más solos: el auge de los servicios que prometen combatir la soledad
 Cambio de hora verano 2025: ¿Hay que atrasar o adelantar la hora?
Cambio de hora verano 2025: ¿Hay que atrasar o adelantar la hora?
 ¿Cuándo es el cambio de hora de marzo? Ya llega el día para pasar al horario de verano
¿Cuándo es el cambio de hora de marzo? Ya llega el día para pasar al horario de verano
